
Grundwissen der Satellitenortung

Satellitenortungssysteme werden allgemein als GNSS bezeichnet. Die Abkürzung steht für Global Navigation Satellite System und bezeichnet einen Komplex aus Satelliten und Bodenstationen, mit dem auf Basis von Signallaufzeitmessungen Positionen und Bewegungsrichtungen von stationären oder mobilen Empfangseinheiten („GPS-Empfänger“, „GNSS-Sensoren“) bestimmt werden können.
Das bekannteste GNSS ist das amerikanische GPS (Global Positioning System). Neben GPS werden verschiedene andere GNSS wie GLONASS, GALILEO und COMPASS betrieben oder aufgebaut.
Satellitensignale in der Landwirtschaft nutzen

In den 1970 Jahren wurden Satellitensystem zunächst nur für militärische Zwecke entwickelt. Bereits in den frühen 1990er Jahren wurden die ersten Versuche zur Ertragsermittlung mit GPS eingesetzt. Die Genauigkeit lag seinerzeit noch bei etwa 100 Metern. Mit der Abschaltung der "Selective Availability" der USA seit dem Jahr 2000 wurde eine Ortung zwischen 10 und 20 Metern möglich. Parallel baut Russland sein Satellitensystem GLONASS aus, welches erst seit 2009 landwirtschaftlich genutzt werden kann. In 2014 wurde in Europa das Projekt Galileo durch die ESA gestartet und befindet sich derzeit noch im Aufbau. Für landwirtschaftliche Zwecke soll es ab diesem Jahr 2020 nutzbar werden, sobald das System in ihrer Anzahl an Satelliten vollständig ist.

Spezialwissen rund um Satellitenortung
Geschichte
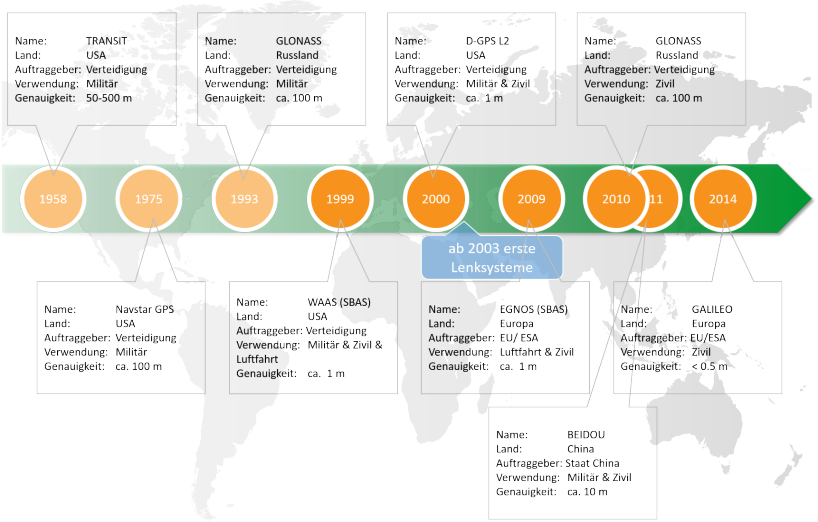
Die Anfänge der heutigen Satellitenortung gehen bis auf das Jahr 1958 zurück. Damals begann die US-Marine mit der Entwicklung des ersten Satelliten - Navigationssystems "Transit" zur Verbesserung der Kriegsführung. Militärisch genutzt wurde das System zum ersten Mal im Jahr 1964. Dieses Satelliten - Navigationssystem erreichte Genauigkeiten von 500 bis zu 15 m je nach Empfänger.
In den 1970er Jahren entwickelte und errichtete das US-Verteidigungsministerium dann ein weiteres, aber deutlich umfangreicheres globales Satellitenortungssystem mit dem Namen "NAVSTAR GPS" (Global Positioning System). Dieses System löste 1985 das erste Satellitensystem der Marine ab und ist seit dem Jahr 1990 voll funktionsfähig. Weite Verbreitung als Navigationssystem in der zivilen Nutzung fand das Global Positioning System erst ab dem Jahr 2000, als die Positionsbestimmung nach einer technischen Optimierung eine Genauigkeit von 5 - 10m erreichte. GPS stellt das derzeit bedeutendste Satellitenortungssystem dar.
Neben dem amerikanischen Verteidigungsministerium etablierte aber auch das russische Verteidigungsministerium nur kurze Zeit später ein ähnlich aufgebautes Satellitenortungssystem mit dem Namen "GLONASS". Mit der Entwicklung des Systems wurde bereits im Jahr 1972 begonnen, offiziell betriebsbereit ist GLONASS seit Herbst des Jahres 1993 und aber erst im Jahr 2010 wurde es für die kommerzielle Nutzung freigegeben (von ALB Bayern). Seit 2014 arbeitet Europa am Aufbau eines eigenen Satellitensystems: Galileo. Dieses Navigationssystem basiert auf insgesamt 30 Satelliten. Die letzten vier sollen Ende 2020 mit einer Trägerrakete ins All fliegen. Ab dann stehen die Dienste zur Positionsbestimmung zur Verfügung.
Satellitensysteme
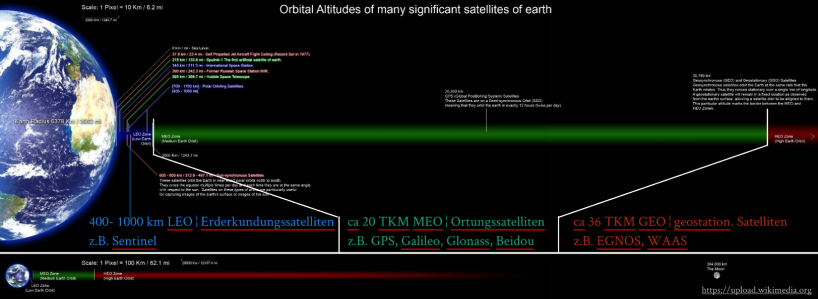
MEO (meteo earth orbiter) GNSS: Global Navigation Satellite System ( GPS, Galileo, Glonass, Beidou) umkreisen die Erde in einer Höhe von ca. 20'000 km.
GEO (geostationäre Satelliten) SBAS: Satellite Based Augmentation System (Satellitenbasiertes Ergänzungssystem) über geostationäre Satelliten mit Bodenstationen z.B. EGNOS, WAAS, ... Sie dienen als zusätzliche Satelliten, welche die Genauigkeit erhöhen. Geostationäre Satelliten drehen sich mit analoger Geschwindigkeit zur Erdrotation in einer Höhe von ca. 36'000 km.
LEO (low earth orbiter) Erderkundungssatelliten: Einsatz in Land- und Forstwirtschaft (Ernteabschätzung, Überwachung von Weidegebieten, Entdeckung von Waldbränden, Abschätzung von Umweltschäden), Kartographie, Geologie (Prospektion von Bodenschätzen), Meeres- und Gewässerkunde und in Klimaforschung. Diese Satelliten befinden sich auf einer Höhe von 400 bis 1000 km. Die bekanntesten Satelliten ist die Sentinell-Familie


European Geostationary Navigation Overlay Service (EGNOS) ist ein europäisches Differential Global Positioning System (DGPS) als Erweiterungssystem zur Satellitennavigation. Es steigert regional begrenzt auf Europa die Positionsgenauigkeit von GNSS. (Wikipedia)

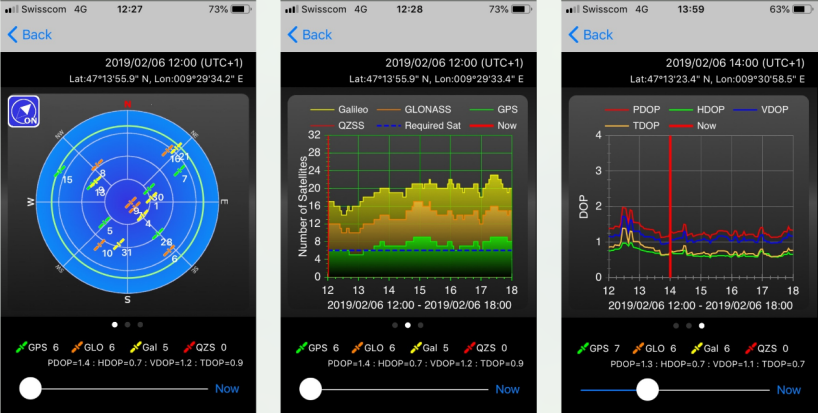
Mittels verschiedener Anwendungen und Apps kann die Signalstärke und die Anzahl verfügbarer Satelliten angezeigt werden.

Grundfunktion
Satellitenortungssysteme funktionieren durch eine Interaktion von Satelliten, Boden- oder Basisstationen und den Empfangsgeräten (GPS-Gerät) auf der Erde. Dabei beruht die Positionsbestimmung auf dem Prinzip der Laufzeitmessung von Signalen.
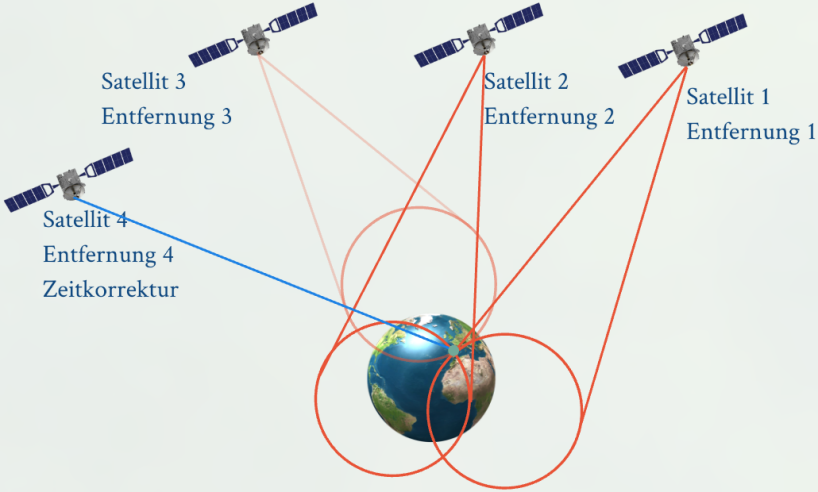
1. Positionsmessung über Triangulation (siehe Bild)
2. Satelliten übertragen eindeutige Kennung und Zeitstempel der integrierten Atomuhr
3. Signal trifft bei Empfänger ein
4. Ermittlung der Dauer des Signals (Laufzeit)
5. aus Laufzeit und der Lichtgeschwindigkeit wird die Entfernung ermittelt (pseudo range)
6. aus drei Satellitenpositionen und drei Entfernungen kann die Position eindeutig bestimmt werden. Ein vierter Satellit dient der Zeitkorrektur (keine Atomuhr im Empfänger)
Die Genauigkeit der Positionsbestimmung ist abhängig von der Position der Satelliten zueinander und zum beobachteten Ort, sowie von der Genauigkeit der Zeitmessung beziehungsweise der Laufzeit.

Störfaktoren
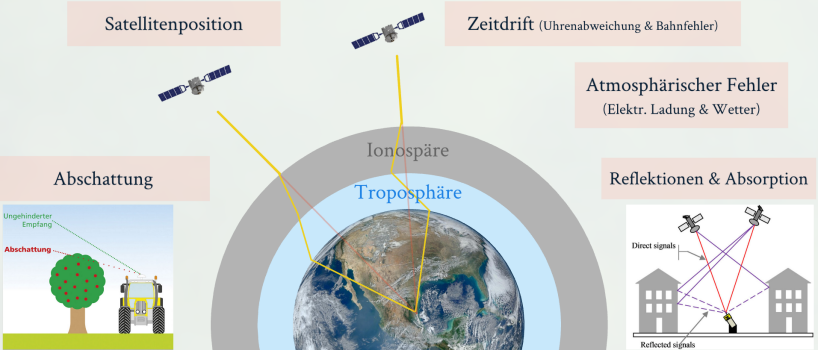
Die Genauigkeit von GNSS-Sensoren hängt von verschiedenen Faktoren ab. Entscheidend sind neben der Qualität der Antenne, der Signalfilterung und den Algorithmen für die Signalverarbeitung die Anzahl der verfügbaren Satelliten, die Konstellation der Satelliten und das Ausmass der atmosphärischen Störungen in der Ionosphäre. Zusätzlich wirken sich Fehler bei der Bestimmung der Satellitenumlaufbahnen und Uhrenfehler auf die Genauigkeit von GNSS aus. Der Einfluss der Atmosphäre und die Satellitenkonstellation ändern sich ständig.
Korrektursignale
Warum werden Korrektursignale benötigt?
Wie im Abschnitt Störfaktoren beschrieben, werden durch unterschiedliche Faktoren die Laufzeiten der Satellitensignale zum Empfänger beeinflusst.
Damit eine genaue Ortung vollzogen werden kann, müssen die Störfaktoren der Signallaufzeit ausgeglichen werden. Dabei werden feste Referenzstationen am Boden installiert, deren exakte geografische Lage bekannt ist. Diese Referenzstationen ermitteln die Laufzeit der Ortungssignale aus der bekannten eigenen Position und dem Zeitstempel der einzelnen Satelliten. Die Differenz aus der ermittelten und der tatsächlichen Laufzeit der Signale gibt den Laufzeitfehler aus. Dieser Laufzeitfehler wird nun als satellitenspezifischer Korrekturfaktor dem Empfangsgerät laufend übermittelt und kann dadurch die Ortungsgenauigkeit erhöhen.
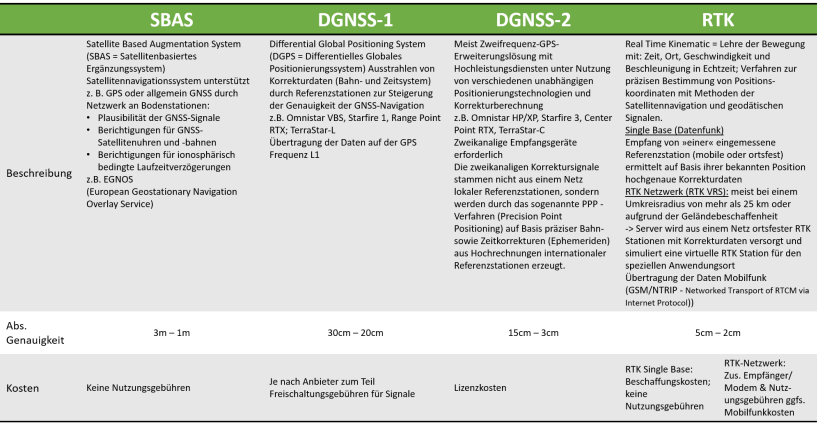
Das System mit den bodengebundenen Referenzstationen wird als differentiell korrigiertes GNSS (DGNSS) bezeichnet und stellt das heutige gängige System dar. Daneben gibt es ein satellitenbasiertes Ergänzungssystem bezeichnet als SBAS (Satellite Based Augmentation System) welches das Satellitennavigationssystem unterstützt. Bekannte SBAS ist das EGNOS (European Geostationary Navigation Overlay Service) oder WAAS (amerikanisches System).
Für die Nutzung von Satellitensignale in der Landwirtschaft ist eine sehr hohe Positionsgenauigkeit erforderlich, die im cm-Bereich liegt. Ohne die Einbeziehung von Korrekturdaten bei der Positionsbestimmung wird eine durchschnittliche Genauigkeit von etwa 10 Metern erreicht. Die Einbeziehung des DGNSS hat die die Positionsgenauigkeit auf ca. 1 Meter erhöht. Durch stetige Optimierungen an Technologie und Herausrechnen der Laufzeitfehler wurden in den letzten Jahren die Signale immer präziser. Aber erst durch den Einsatz von RTK wurde die höchste Genauigkeit und Wiederholbarkeit erzielt.
Die Übertragung der Korrektursignale erfolgen heute und in unserer Region im Wesentlichen über zwei Varianten: via Satellit oder Mobilfunk, in den Anfängen auch über Funkfrequenzen
Übertragung via Satellit
Es wird dabei unterteilt in einkanalige Systeme (z.B. EGNOS, StarFire I, OmniSTAR VBS, Range Point RTX; TerraStar-L), die die Korrekturdaten nur auf der Frequenz L1 empfangen und zweikanalige Dienste (StarFire III, OmniSTAR XP/HP, Center Point RTX, TerraStar-C), die die Korrekturdaten auf den Frequenzen L1 und L2 erhalten. Bei L1-Empfängern kommen die Korrekturdaten immer über die am nächstgelegen Referenzstationen im Umfeld des Signalempfängers und wird im Empfänger zur bestmöglichen Positionsbestimmung verrechnet. Die zweikanaligen Korrektursignale werden durch das sogenannte PPP - Verfahren (Precision Point Positioning) errechnet. Dabei geschieht durch Extrapolation und den Informationen von globalen Referenzstationen die Erzeugung der Zeitkorrekturen. Aufgrund der aufwendigen Berechnungen benötigen diese System häufig eine längere Initialisierungszeit vor dem Einsatz mit dem Ziel einer höheren absoluten Genauigkeit.
Übertragung via Mobilfunk
Bei diesem Korrekturdienst werden auch über ortsfeste Stationen Korrekturdaten erstellt. Am örtlichen Anwendungsort wird eine virtuelle Station simuliert, die wiederum dem Empfänger die Korrekturdaten per Mobilfunk zur Verfügung stellt. Dieses Verfahren wird als RTK (Real Time Kinematik) bezeichnet.

Genauigkeit
Die Positionsbestimmung mit GNSS beruht auf die Messung von Signallaufzeiten vom Satellit zum Empfänger. Als Ergebnis hängt die Genauigkeit von GNSS-Sensoren von verschiedenen Faktoren ab. Die Grundlagen für die Positionsbestimmung sind in einem stetigen Wandel durch ändernden Einfluss von Atmosphäre und Satellitenbewegungen. Daher haben verschiedene Aspekte Einfluss auf Signalstärke und präzise Ortung, wie: die Qualität der Antenne, Signalfilterung, Anzahl und Konstellation von Satelliten, atmosphärische Störfaktoren und die Algorithmen der Signalverarbeitung. Entscheidend für die Positionsgenauigkeit sind die Anzahl der verfügbaren Satelliten und ihrer Stellung zueinander.
Somit gilt für Genauigkeit ist die Verfügbarkeit und Funktionssicherheit von Bedeutung. Diese lassen sich in die Bereiche Satelliten und Korrektursignal unterteilen. Für die Satelliten gilt: Je mehr, desto besser. Für eine Positionsbestimmung braucht es abhängig von der Systemgenauigkeit mindestens vier Satelliten und möglichst freie Sicht nach Süden.
Für die praktische Anwendung wird unterschieden in:
- absolute Genauigkeit = wiederholbare Genauigkeit
- wie stark weicht die gemessene Position von der wahren Position ab
- sie ist wichtig bei langfristiger Nutzung von Positionen z.B. fixe Fahrspuren, Strip Till, Controlled traffic farming, Dauerkulturen, Feldgrenzen
- wie stark weicht die gemessene Position von der wahren Position ab
- relative Genauigkeit = Spur-zu-Spur Genauigkeit
- Die Angabe 2.5 cm Spur-zu-Spur Genauigkeit bedeutet, das ein Fahrzeug innerhalb von 15 Minuten 95% der Zeit (also 14 Minuten) weniger als 2.5 cm von der Fahrspur oder der Ausgangsposition abweicht.
- wichtig bei Parallelfahrlenksystemen
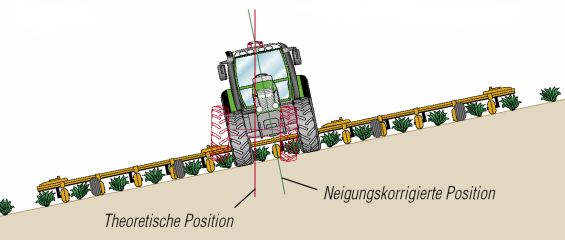
Hangneigungskorrektur
Um die Qualität auch bei geneigten Feldern erreichen zu können, ist eine Hangneigungskorrektur notwendig. Exakte Systeme haben deshalb zusätzliche Sensoren integriert, welche den seitlichen Versatz kompensieren können.